
Robotik
Robotik är ett mångvetenskapligt forskningsfält som bl.a. innefattar ämnena mekanik, reglerteknik och elektroteknik samt datavetenskap och artificiell intelligens. Robotteknik används för att utföra arbetsuppgifter där man repeterar samma sak många gånger, farliga uppdrag, uppgifter som kräver hög precision, hälso- och sjukvård och omvårdnad etc.
En robot är en elektromekanisk maskin som är programmerad att utföra specifika uppgifter och den är vanligen sammansatt av mekaniska komponenter, motorer, sensorer och styrsystem. Det finns många miljöer där man kan använda robottekniken varav några är inom industrin (t.ex. såsom montering av solceller, böja stål), farliga omgivningar (t.ex. såsom övervakning och avveckling av kärnreaktorer, utforskning av rymden) på sjukhus (t.ex. såsom avancerad hjärnkirurgi, träning av personal) hemmamiljö (t.ex. såsom hjälpa äldre och handikappade i deras vardag). Det finns olika anledningar att använda robotteknik men huvudorsaken är att förbättra effektiviteten och minska kostnaderna för dagens tillverkningsteknik, medicinska metoder, sjukvård och omvårdnad.
Forskningen fokuserar att konstruera, implementera och testa avancerade kontrollmetoder baserad på artificiell intelligens-algoritmer för att optimera prestationen av komplexa system i syfte för en rad nya robottekniska och automatiserings- tillämpningar inom vård (gånghjälpmedel, äthjälpmedel, etc.), hållbarhet (drönare för miljöövervakning, etc.) och energisystem (solcellssystem, etc.).
Pågående forskning vid Karlstad Universitet (KaU) fokuserar om tre olika områden: åldrande, miljö och energi.
- Energi: AI algoritmer implementerade och testade för att göra prognoser på energiförbrukningen. Detta handlar om hur man programmerar adaptiva styralgoritmer för aktiv analys, diagnos för att göra prediktering av energiförbrukning och göra korrigerande åtgärder i rätt tid för lastbalansering. Som resultat, har prediktering av energiförbrukning inom två timmar framåt verifierats i en fastighet som är anslut till ett PV-system med batterilager. Vid en internationell konferens, icSmartGrid 2019, mottog vi en pris (Excellent Paper Award) för vårt konferensbidrag om prediktering av energiförbrukning.
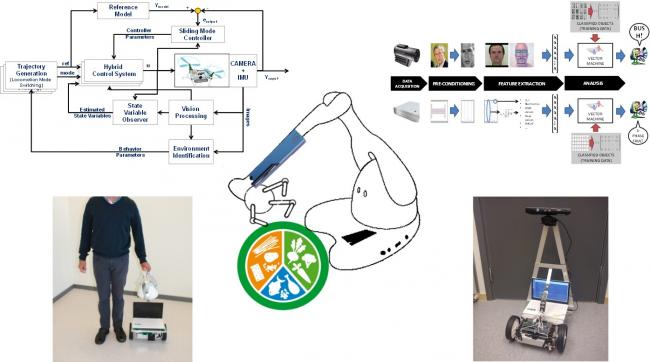
- Miljö: adaptiv styrsystem metoder och AI-algoritmer implementerade och testade för att detektera positionen av enda referensmarkör som en input till styrsystem för att kunna utföra den autonoma styrningen av en liten drönare för miljöövervakning. Det långsiktiga syftet med detta är att utveckla en intelligent robotfarkost med multimodal rörelseförmåga för miljöövervakning och skörd.
- Åldrande: AI-algoritmer implementerade och testade för att uppskatta positionen av livsmedel i tallriken som en input till styrsystem av en Äthjälpmedel. Vision baserade styrning kommer att testa med en robot arm med griper. Det långsiktiga syftet med detta är att hjälpa äldre att vara oberoende eftersom det kan underlätta att äta måltiden med minimala kognitiva behov.
Några andra exempel på aktuella projekt som bedrivs tillsammans med forskare från andra universitet t.ex. Waseda Universitet (Japan), SSSA-PERCRO (Italien), Warszawa Tekniska Universitet (Polen), Cassino Universitet (Italien), etc. är humanoida robotar, perceptuella robotar, robotar för utbildningsändamål samt robotar för medicinska tillämpningar.